Lin Zhao (赵林)I am a Postdoctoral Fellow working with Dr. Paolo Stegagno and Dr. Mingxi Zhou on Swarm SLAM on marine robotics at the University of Rhode Island, where I got my Ph.D. degree in Ocean Engineering. During my Ph.D., I was supervised by Dr. Mingxi Zhou and working on multi-sensor SLAM for autonomous robotics in harsh environments (e.g., under-ice). Before that, I was working in several robotics startups in Hangzhou, China. I got my Master's degree of Mechanical Engineering from the University of Nevada, Las Vegas, where I was supervised by Dr. Woosoon Yim and working on obstacle avoidance for the drones. Email / CV / GitHub / Google Scholar / LinkedIn |

|
Research |
|
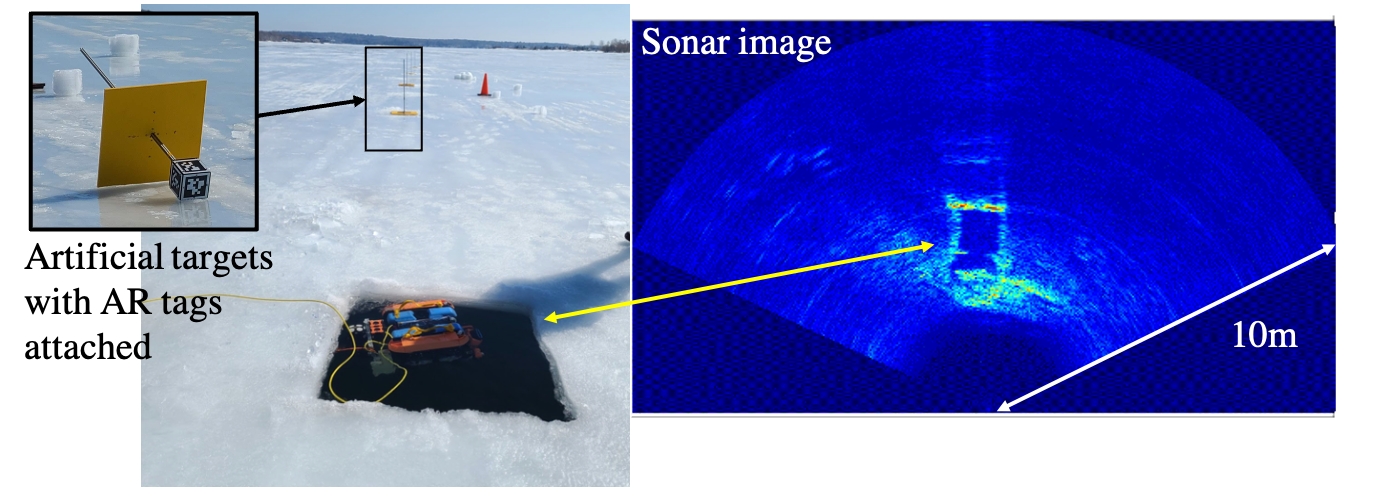
Tightly-coupled Visual-DVL-Inertial Odometry for Robot-based Ice-water Boundary ExplorationLin Zhao, Mingxi Zhou, Brice Loose IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2023 paper / code / poster / slides / We use Doppler Velocity Log (DVL) non-uniform sparse point clouds to aid feature estimation and improve the under-ice localization. |
|
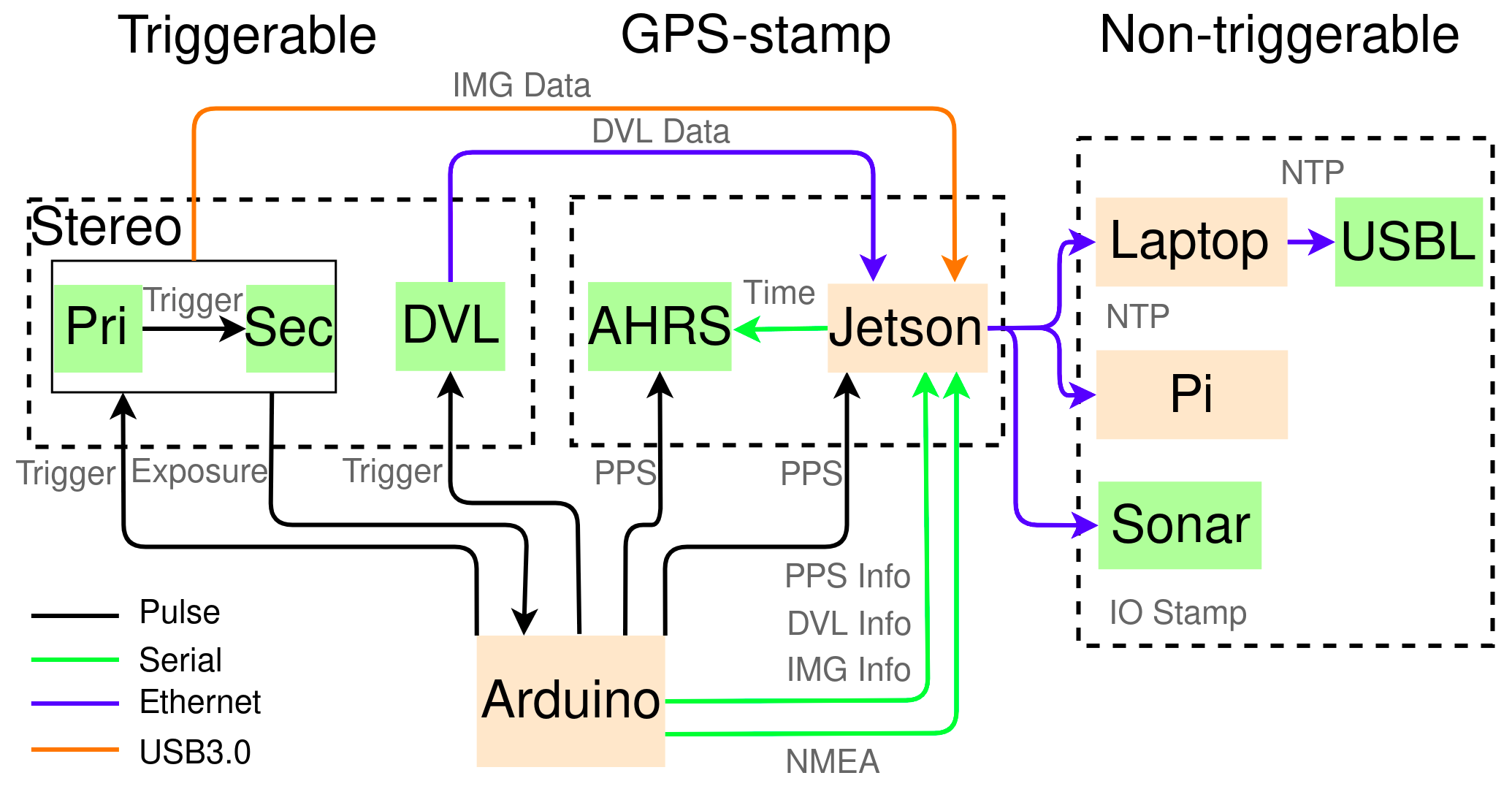
Towards Under-ice Sensing using a Portable ROVLin Zhao, Mingxi Zhou, Brice Loose OCEANS, 2022 (Student Poster Competition Finalist) paper / code / poster / System integration (i.e., hardware time synchronization) for Alaska under-ice data collection and Dead-Reckoning (i.e., DVL and Pressure update the IMU model). |
|
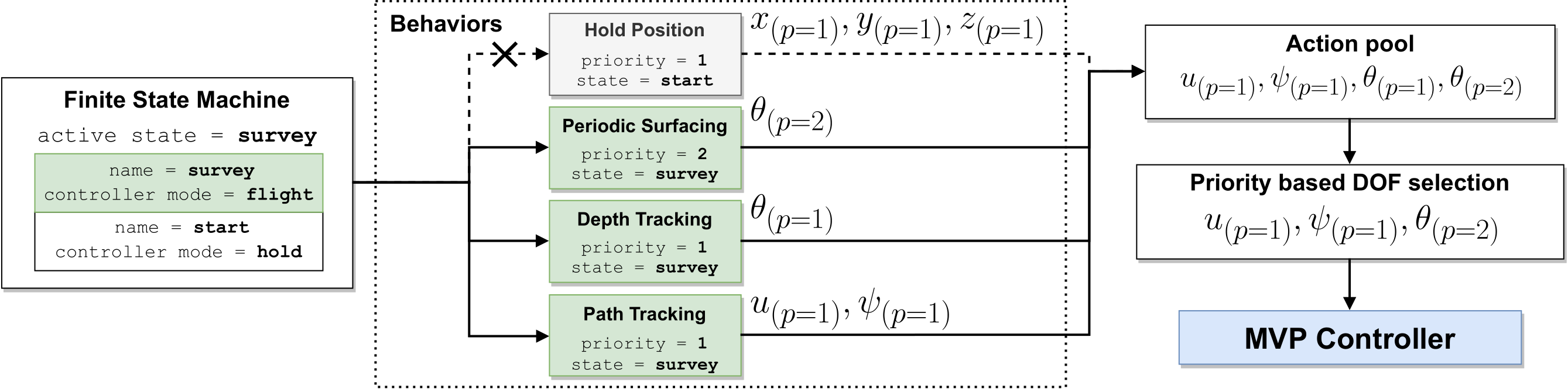
Working toward the development of a generic marine vehicle framework: ROS-MVPEmir Cem Gezer, Mingxi Zhou, Lin Zhao, William McConnell OCEANS, 2022 paper / code / The ROS-MVP framework provides three sub-modules: a low-level controller, plugin-based behavior interface, and a mission planner. |
|
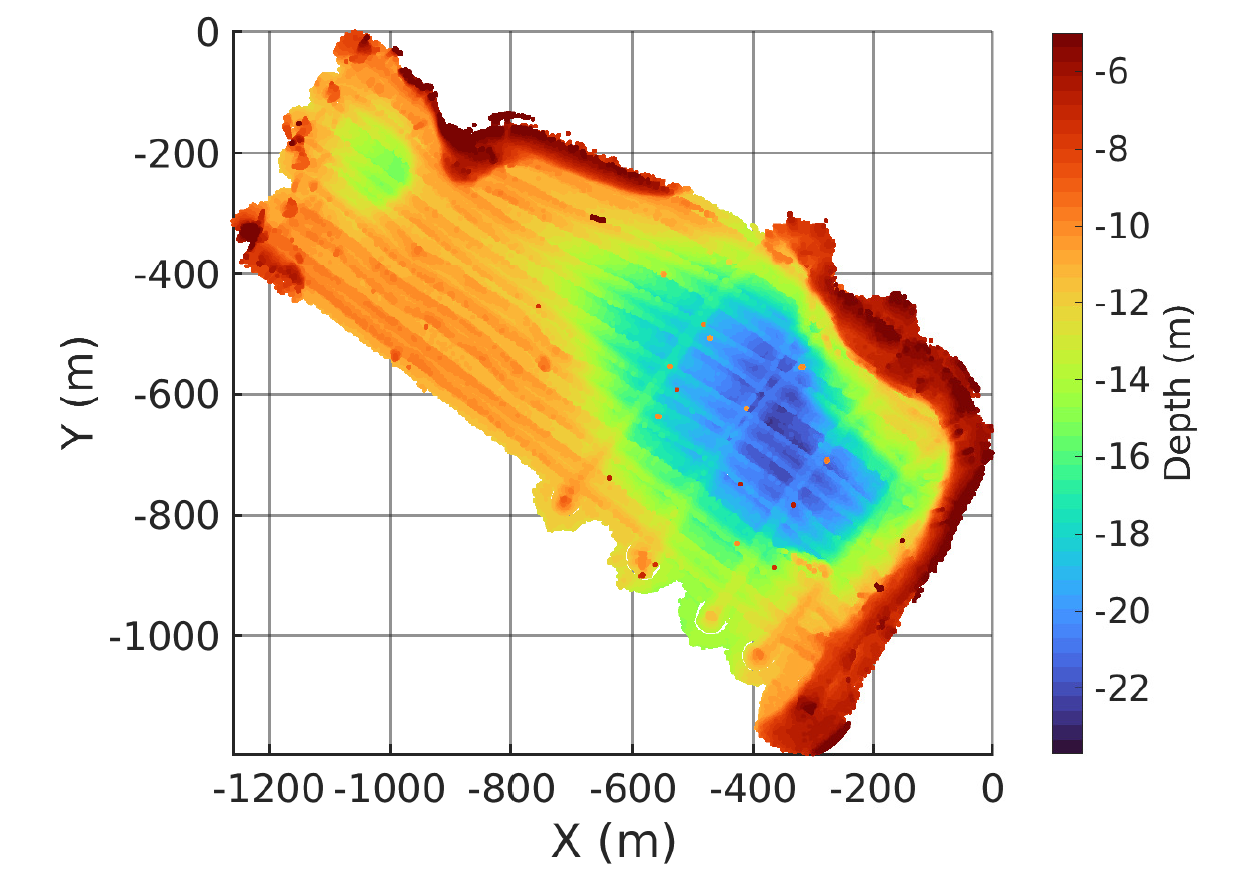
Towards seafloor mapping using an affordable micro-UUVEmir Cem Gezer, Lin Zhao, Jordan Beason, Mingxi Zhou OCEANS, 2021 paper / Riptide Micro-UUV and Bathyswath interferometric side-scan sonar integration. Sonar data processing for sub-map mapping. |
|
Modifying an Affordable ROV for Under-ice SensingLin Zhao, Mingxi Zhou, Brice Loose, Virginia Cousens, Raymond Turrisi OCEANS, 2021 paper / Freshwater ice data collection with multi-sensors (e.g., IMU, DVL, Stereo, FLS). |
|
Towards the Development of an Online Coverage Path Planner for UUV-based Seafloor Survey using an Interferometric SonarMingxi Zhou, Jianguang Shi, Lin Zhao IEEE/OES Autonomous Underwater Vehicles Symposium (AUV), 2020 paper / We propose a new online CPP algorithm for a UUV equipped with an interferometric sonar for seafloor mapping. |
|
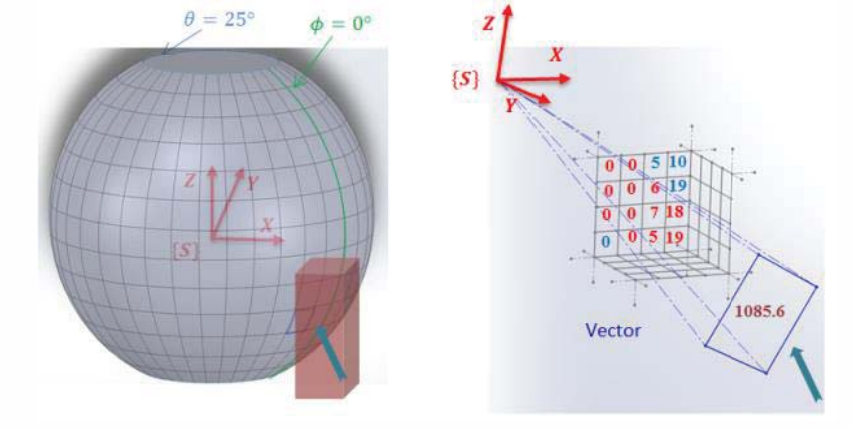
Unmanned Aerial System for First RespondersZachary Cook, Lin Zhao, Jameson Lee, Woosoon Yim International Conference on Ubiquitous Robots and Ambient Intelligence (URAI), 2015 paper / code / A 3D vector mesh (VM) obstacle avoidance algorithm extented from 2D Vector Field Histogram. |